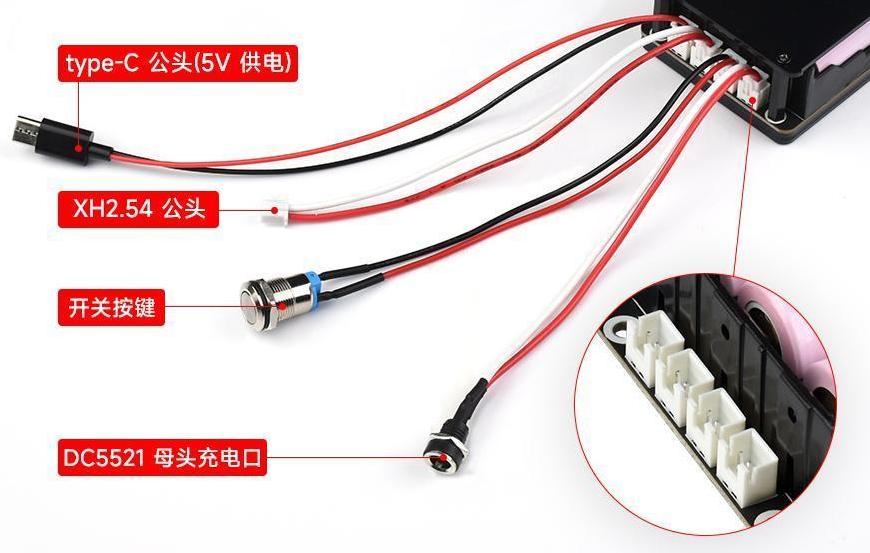
DC5521母头充电口为12.6V 2A充电接口,使用12.6V 2A电源为其充电;开关按键为电源输出的开关;XH2.54公头为12.6V 2A电压输出口;type-C 公头为5V电压输出口。
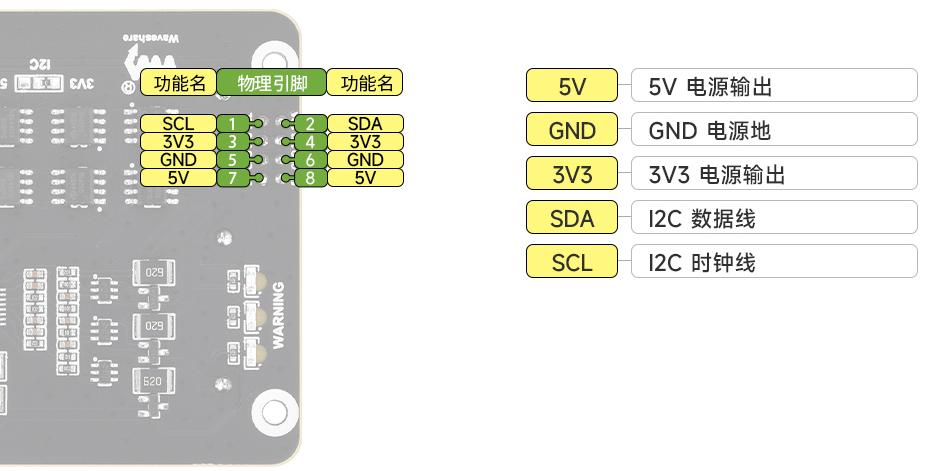
多功能扩展接口中包含有5V电压输出、3V电压输出以及IIC输出。
注意1:首次接上电池需要注意LED灯是否亮,如果LED亮则表示对应的电池接反了。电池接反情况下禁止充电。
注意2:首次接上电池有可能会没有电源输出,需要按一下电路板上的BOOT键激活电池保护芯片才会有电源输出。
注意3:要使用产品配置的电源充电,使用其他电源有可能输出电源纹波太大不稳定导致产品损坏。
注意4:电池正极绝缘垫如果弄掉坏了建议不要继续使用容易导致短路起火,拆电池时切忌用螺丝刀撬电池正极容易导致短路要撬电池负极。

GPIO引脚连接如下表所示:
| UPS锂电池扩展板 | 树莓派开发板 |
| 5V | 5V |
| GND | GND |
| SCL | SCL |
| SDA | SDA |
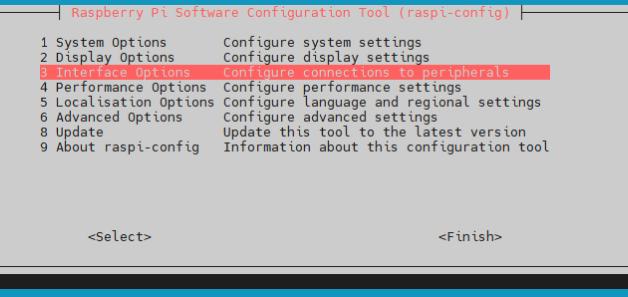
sudo raspi-config
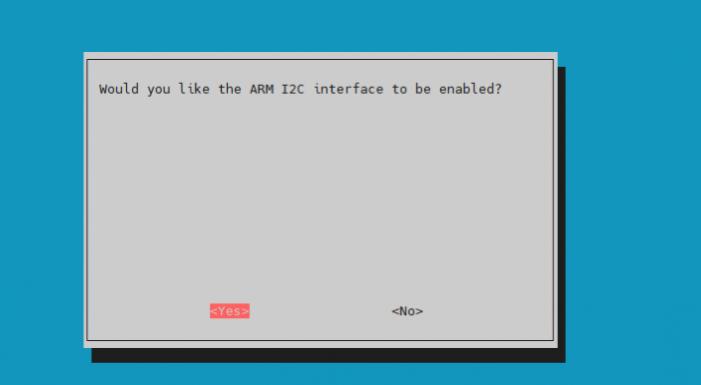
选择Interface Options -> I2C -> Yes
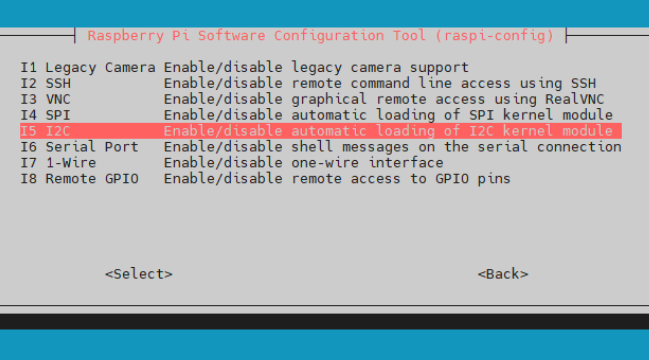
cd UPS\ Module\ 3S/ sudo python3 INA219.py

| 原理图 | 树莓派示例程序 | 产品模型 | 产品尺寸图 |
答:不能,需要用适配的12.6V 2A 电源充电。
答:适配的电源上有指示灯,红灯充电,绿灯充满,快充满时可能会闪烁。指示灯熄灭有可能是短路了。

