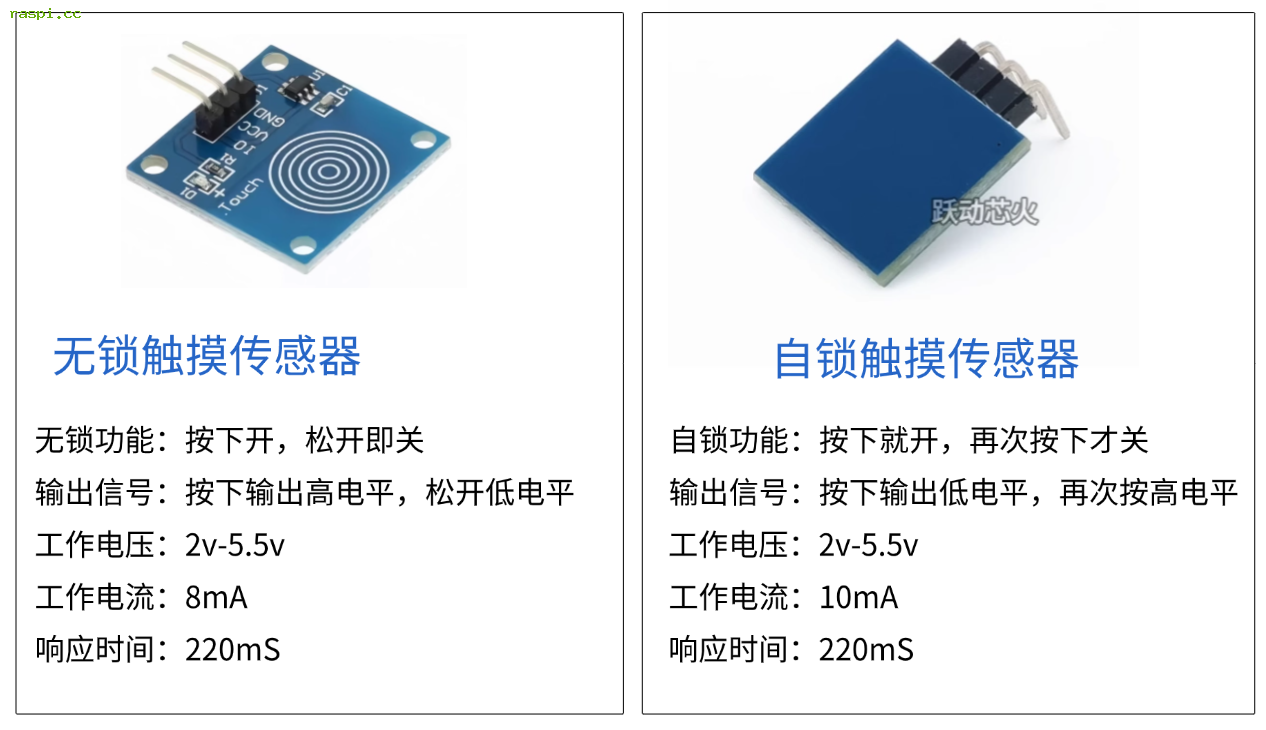
红外避障传感器的工作原理主要依赖于红外线特性,传感器是由红外发射管和红外接收管组成,会对探头正前方环境进行探测。通过发射出一束红外光并接收其反射回来的信号来工作。当收到反射的信号后,会产生相应的电压信号。 通过传感器的原理,我们可以用来做机器人循迹、避障或流水线计数等!

| 红外避障传感器原理图 | 传感器资料 |
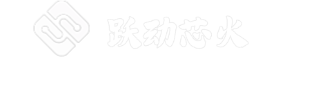
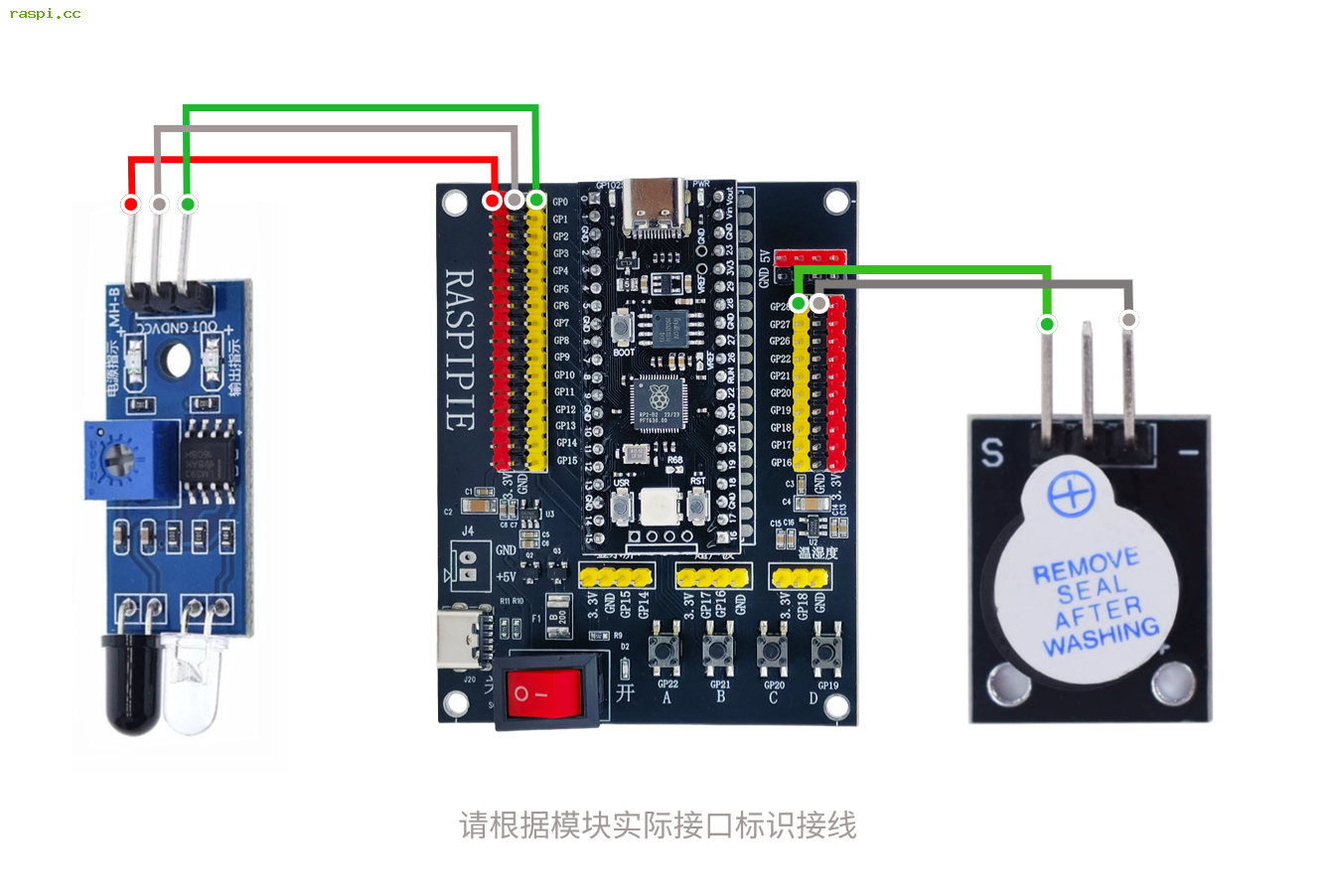
教程思路:使用树莓派Pico+避障传感器+报警器打造一个自动检测前方是否有障碍物出现并显示+报警。
| 红外避障传感器 | 树莓派Pico |
| VCC | 3.3V |
| GND | GND |
| OUT | GPIO |
蜂鸣器的-负接主板GND,S信号接GP28
1.编程思路:已知传感器检测到障碍物会输出低电平信号,我们用Python写个检测GP0引脚是否有低电平输入,如果有代表检测到了障碍物,然后在控制蜂鸣器报警!
2.下载源代码后,上传至树莓派Pico内,直接运行代码查看结果。 此时遮挡传感器探头观察蜂鸣器的报警变化~

结果:当传感器检测障碍物触发报警器响。 未检测到障碍物报警器停止。
该代码实现了树莓派 Pico 通过 GPIO 引脚进行简单的输入检测与输出控制功能:
1.监测 GP0 引脚的电平状态,当 GP0 检测到低电平时(如接地),控制 GP28 引脚输出高电平
2.当 GP0 未检测到低电平时(默认高电平状态),GP28 引脚保持低电平(不输出高电平)
3.程序采用循环检测方式,具备良好的实时响应性
GPIO 引脚配置:
Pin(0, Pin.IN, Pin.PULL_UP):将 GP0 配置为输入模式,并启用内部上拉电阻内部上拉电阻作用:使引脚在未连接外部电路时能稳定保持高电平状态,避免电平漂移,Pin(28, Pin.OUT):将 GP28 配置为输出模式,可通过程序控制其输出高低电平
电平状态检测:
value()方法:用于读取引脚当前电平状态,返回 0 表示低电平,1 表示高电平,低电平检测逻辑:当gp0.value() == 0时,判定为检测到低电平
输出控制:
value(1):设置引脚输出高电平,value(0):设置引脚输出低电平,输出状态会根据输入状态实时更新
程序结构:
无限循环while True:实现持续监测功能,延时函数time.sleep(0.01):平衡响应速度与 CPU 资源占用,异常处理try...except KeyboardInterrupt:捕获用户终止指令,确保程序退出
MicroPython 特定知识:
machine模块:树莓派 Pico 控制硬件的核心模块,提供 GPIO、定时器等硬件控制功能,引脚编号:直接使用物理引脚编号(如 0、28),对应 Pico 板上的 GP0、GP28 引脚通过这个简单的程序,可以理解嵌入式系统中最基础的输入输出控制原理,为更复杂的硬件交互打下基础。
联系人:张工
电话:0755-32914578
QQ:2251000002
微信:扫下方二维码添加,请备注来意
提供:人工智能,IOT物联网,工控数显,嵌入式软硬件开发,科创教育,产品定制,生产,方案解决...