L9110 风扇模块采用 L9110 电机控制芯片,该芯片为双通道 H 桥驱动芯片,具备两个 TTL/CMOS 兼容输入端子(INA 和 INB)。这种设计可以独立的去控制制电机的正反转,只需要给INA和INB一个低电平信号就能启动风扇。需要注意的是,INA和INB每次只能单独给其中一个低电平。因为风扇不可能同时正反转。 需要正转就给INB低电平信号,需要反转就给INA低电平。

| L9110电机风扇模块 | 树莓派Pico |
| VCC | 5V |
| GND | GND |
| INA(反转) | GP1 |
| INB(正转) | GP0 |
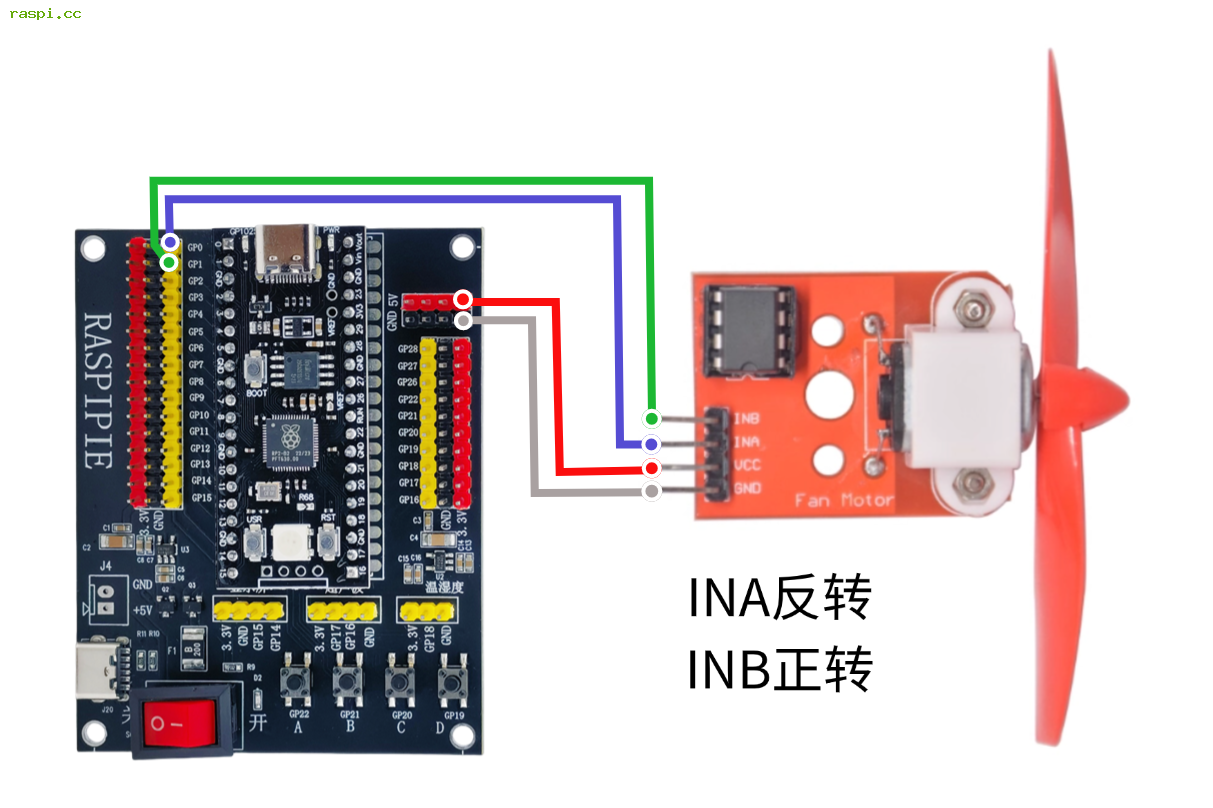
代码功能:下载代码后上传Pico文件直接运行,程序设定了输出GP0低电平5秒后让GP1输出5秒。 可以看到的效果:先正转5秒,然后反转5秒

核心知识点
(一)MicroPython 硬件控制基础
machine.Pin类:GPIO 引脚操控核心
作用:用于初始化 GPIO 引脚,配置引脚模式(输入 / 输出)、初始状态等;
语法:machine.Pin(引脚编号, 模式, value=初始值);
示例解析:machine.Pin(0, machine.Pin.OUT, value=1)
→ 引脚编号:0(对应 GP0);
→ 模式:machine.Pin.OUT(输出模式,输入模式为machine.Pin.IN);
→ 初始值:1(高电平,0 为低电平,仅输出模式有效)。
time.sleep():时间延迟控制
作用:让程序暂停指定时间(单位:秒),期间保持当前引脚状态;
注意:该函数为 “阻塞式”,延迟期间程序不会执行其他操作,若需非阻塞延迟需使用定时器(如machine.Timer)。
(二)GPIO 引脚控制关键概念
输出模式与电平状态
输出模式:引脚可主动输出高 / 低电平,用于控制外部设备(如 LED、继电器、电机模块等);
电平定义:MicroPython 中,value(1)代表高电平(通常对应 3.3V,Pico GPIO 工作电压),value(0)代表低电平(对应 GND,0V);
应用场景:低电平触发外部设备(如 LED 点亮)、高电平复位设备等,需根据硬件电路设计匹配电平逻辑。
中断处理与资源清理
KeyboardInterrupt:捕获用户通过Ctrl+C发出的中断信号,避免程序 “卡死”;
资源清理必要性:若不恢复引脚高电平,可能导致外部设备持续工作(如 LED 常亮、电机空转),浪费功耗或损坏硬件;
扩展:实际项目中,可在except块中添加更多清理逻辑(如关闭串口、释放传感器资源等)。
(三)硬件连接与调试技巧
引脚状态验证方案
简易电路:GP0/GP1 → 220Ω 限流电阻 → LED 正极 → LED 负极 → GND;
逻辑对应:引脚输出低电平时,电流从 GND 经 LED、电阻流向引脚,LED 点亮;输出高电平时,无电流,LED 熄灭;
注意:必须串联限流电阻(推荐 100Ω-1kΩ),防止电流过大烧毁引脚或 LED。
常见问题排查
引脚无反应:检查 Pico 是否烧录 MicroPython 固件、引脚编号是否正确(避免混淆物理引脚号与 GPIO 编号)、硬件接线是否松动;
程序无法中断:确保 IDE 与 Pico 通信正常(如 Thonny 需选择正确的串口和设备),若中断后引脚状态异常,可重新运行程序后正常停止。
联系人:张工
电话:0755-32914578
QQ:2251000002
微信:扫下方二维码添加,请备注来意
提供:人工智能,IOT物联网,工控数显,嵌入式软硬件开发,科创教育,产品定制,生产,方案解决...