此款震动模块采用MOS管驱动,可以直接通过输入引脚给一个高电平信号来驱动它震动,也可以使用PWM信号控制马达的震动强度频率等,此模块可以方便的完成电信号到机械震动感的转换适用于震动感互动产品的制作,可穿戴智能设备震动提醒等
模块参数:
额定电压:5.0VDC
工作电压:3.0 - 5.3VDC
额定转速:最小9000转每分
额定电流:最大60毫安
起动电流:最大90毫安
启动电压:DC3.7V
绝缘电阻:10MOHM
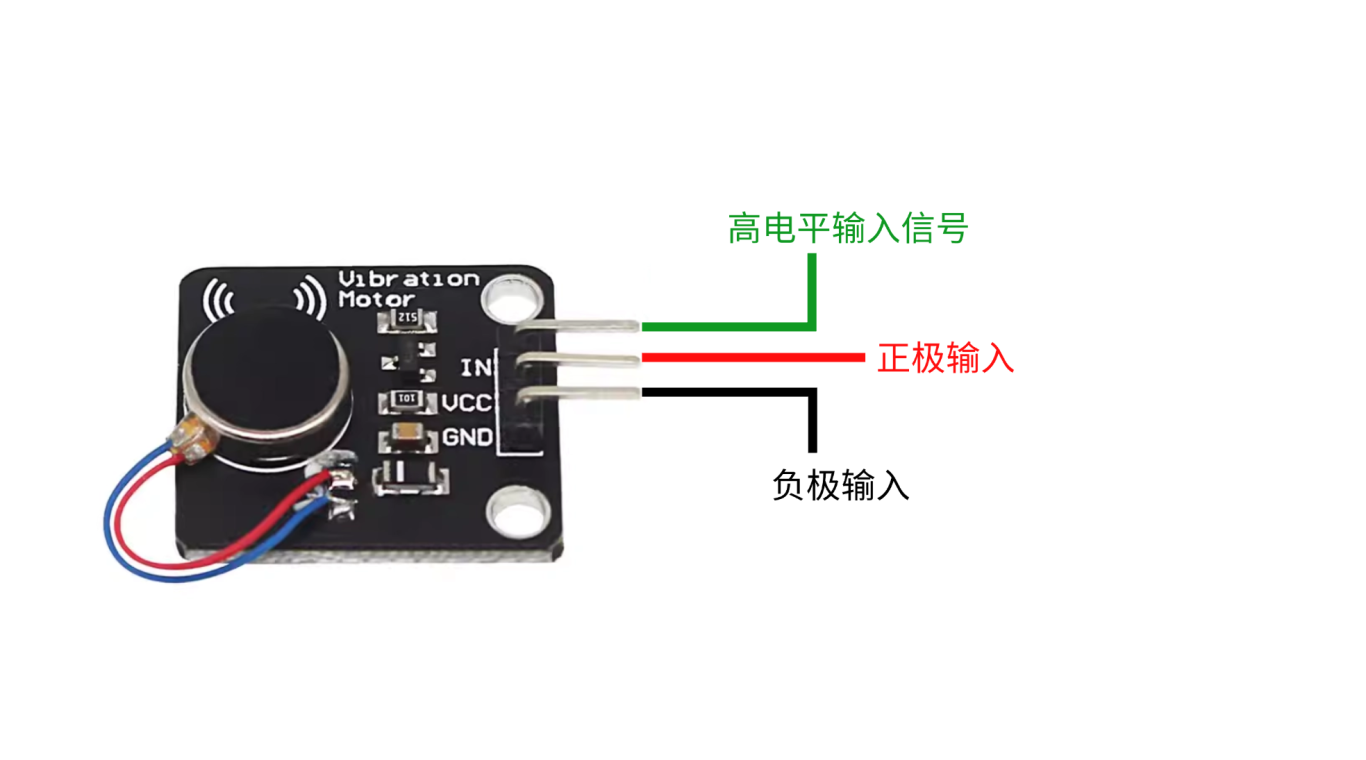
按下图的方式接线,VCC接正极,GND接负极, IN信号也接在正极上,就可直接驱动它震动
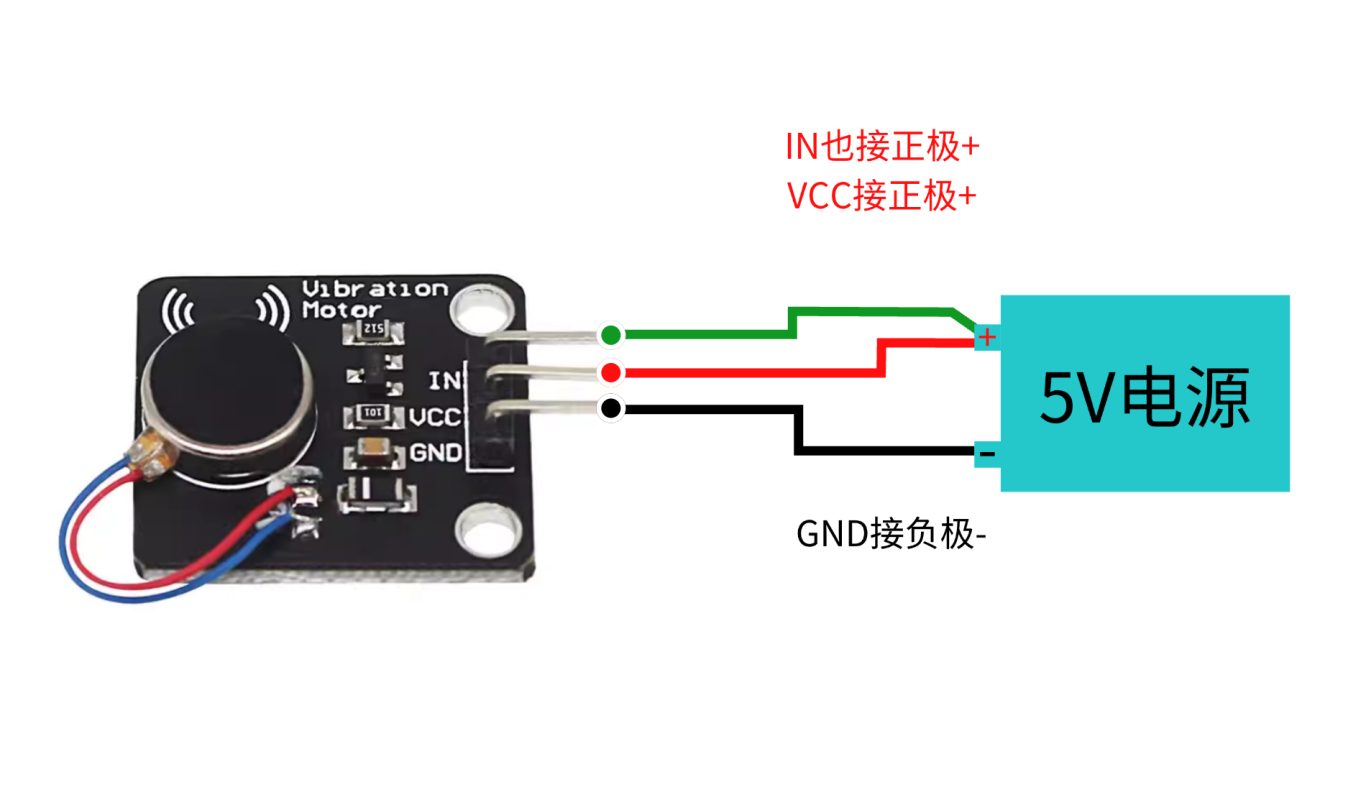
由于用5V电池或者5V充电器直接驱动该模块。我们是没办法控制震动的时间强度!如果要实现这一功能需要用单片机或者开发板写个程序来控制震动马达的时间强度。
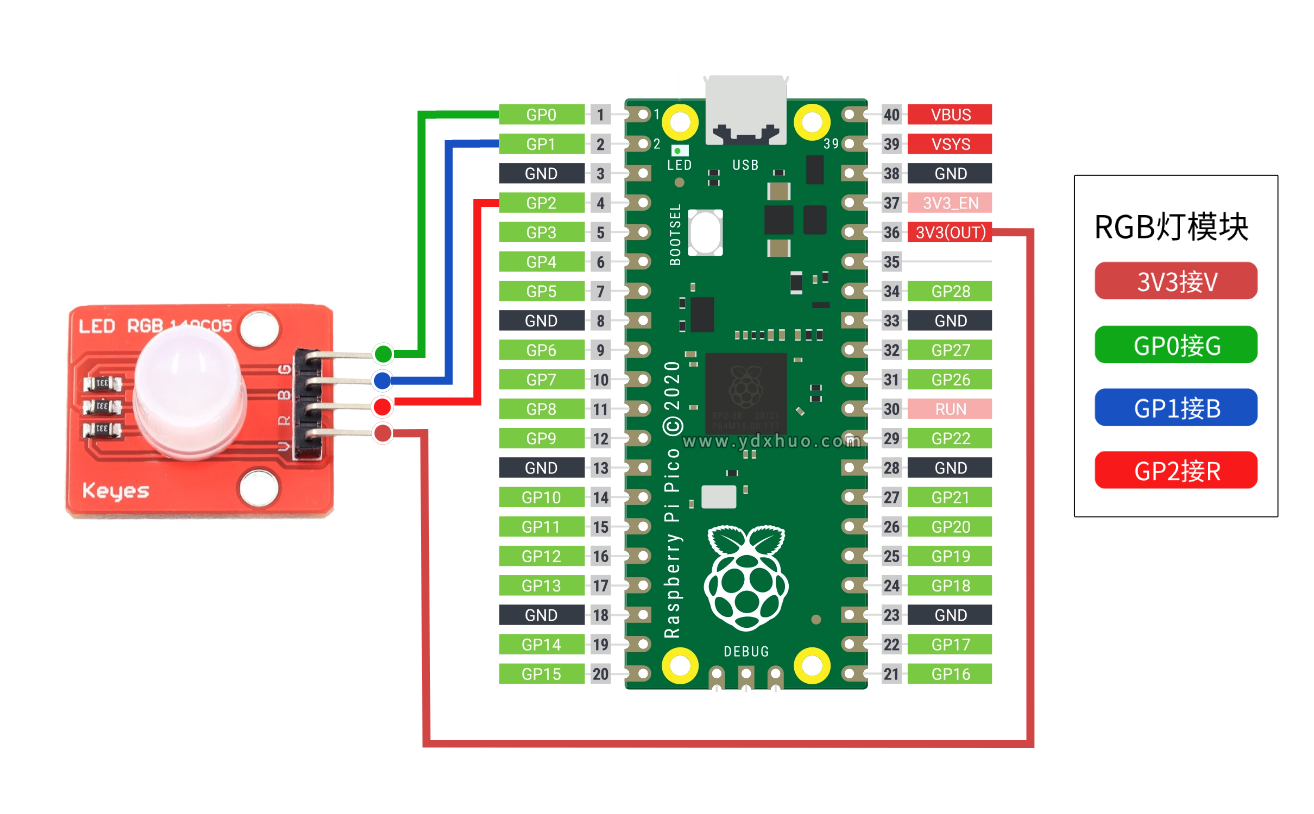
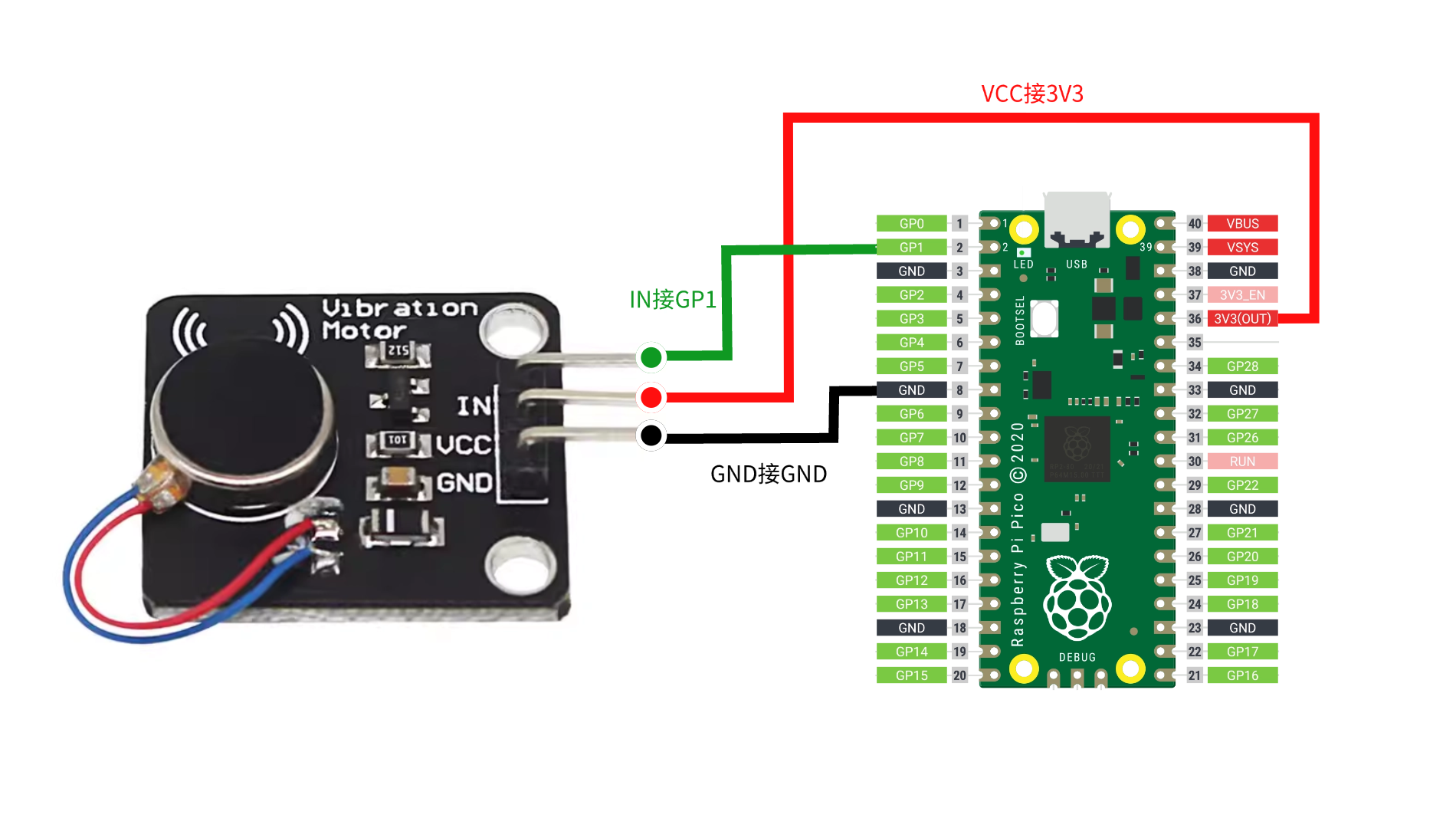
按下图,VCC正极接开发板3v正极,GND负极接开发板GND负极。 IN信号接开发板GP1引脚。
我们就可以写个程序去控制GP1引脚输出高电平时间从而调整震动时间,比如输出高电平10秒。那么震动模块也就震动10秒。
# 导入Pico的引脚控制模块和时间模块
from machine import Pin
import time
# 初始化GP1引脚为输出模式
gp1_pin = Pin(1, Pin.OUT)
try:
# 将GP1引脚设置为高电平
gp1_pin.value(1)
print("GP1已输出高电平,将持续10秒...")
# 保持高电平10秒(time.sleep的单位是秒)
time.sleep(10)
# 10秒后将GP1引脚设置为低电平(停止输出高电平)
gp1_pin.value(0)
print("10秒已到,GP1已恢复低电平")
except KeyboardInterrupt:
# 处理手动终止(如按Ctrl+C)的情况,确保引脚恢复低电平
gp1_pin.value(0)
print("程序被手动终止,GP1已恢复低电平")可直接复制上述代码粘贴到树莓派Pico编程环境中使用,从代码中我们可以看到GP1引脚设置高电平输出,由GP1引脚驱动震动模块。