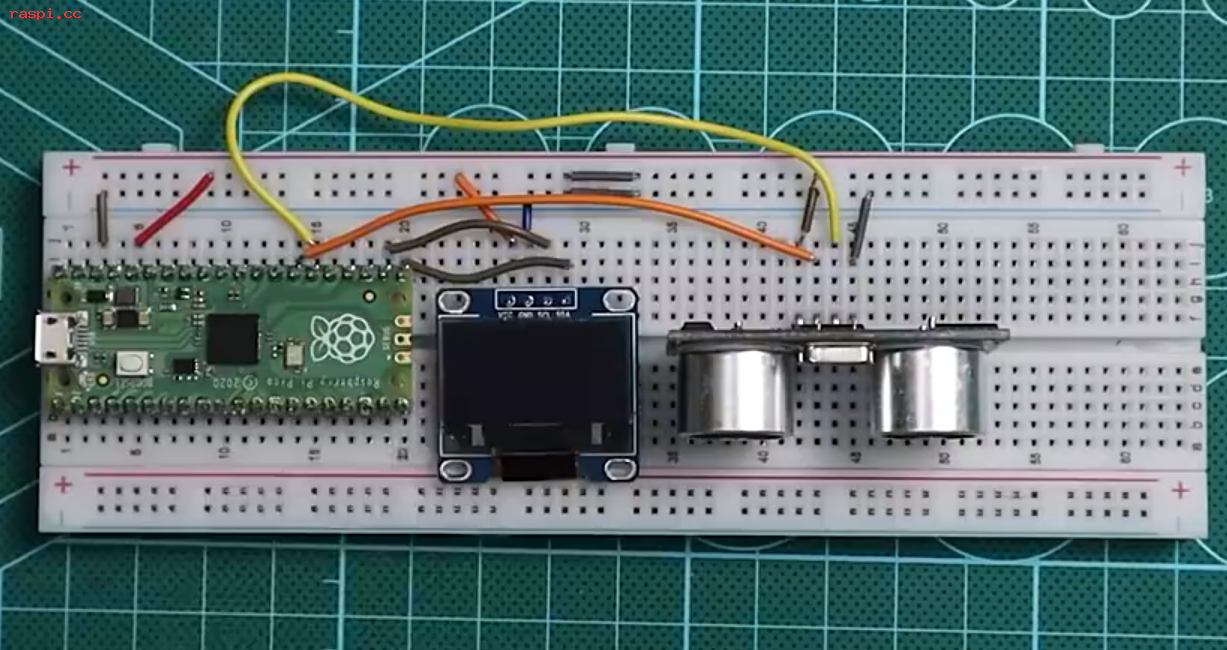
二:树莓派主板接线方法
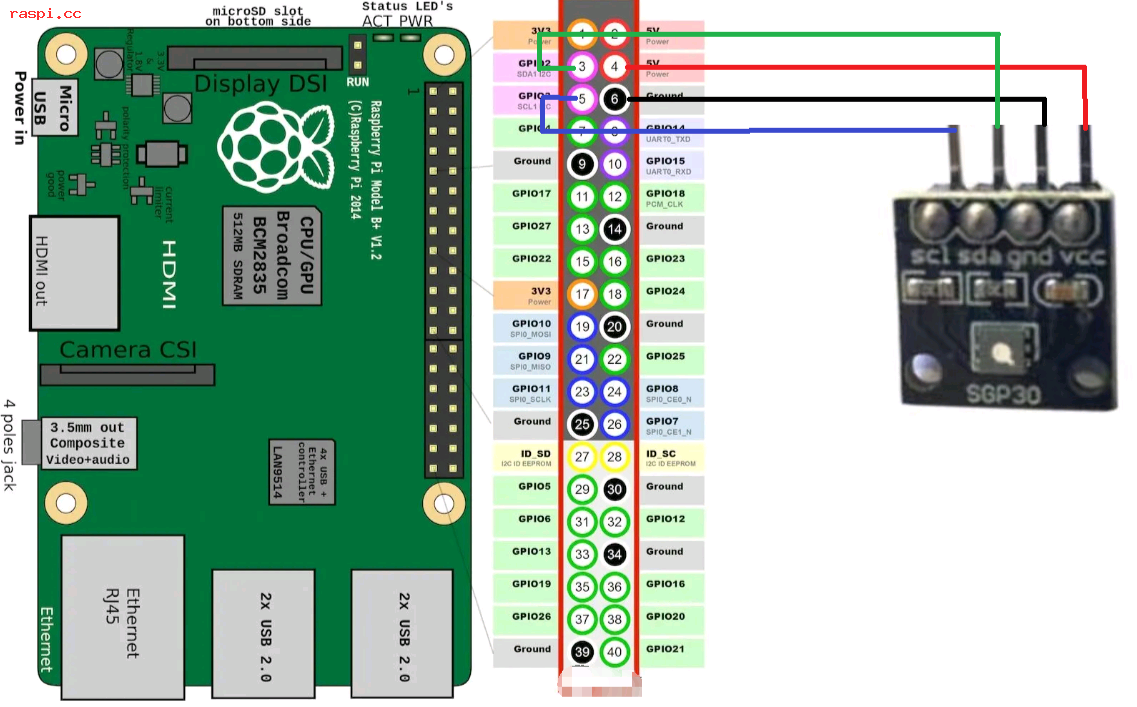
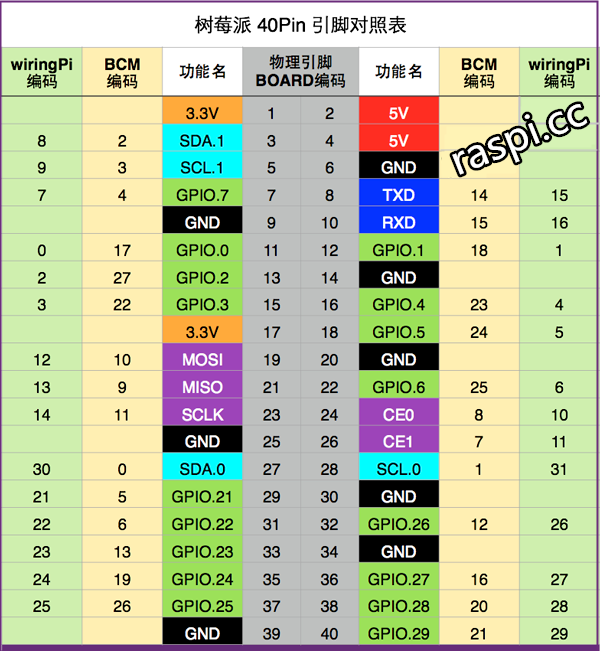
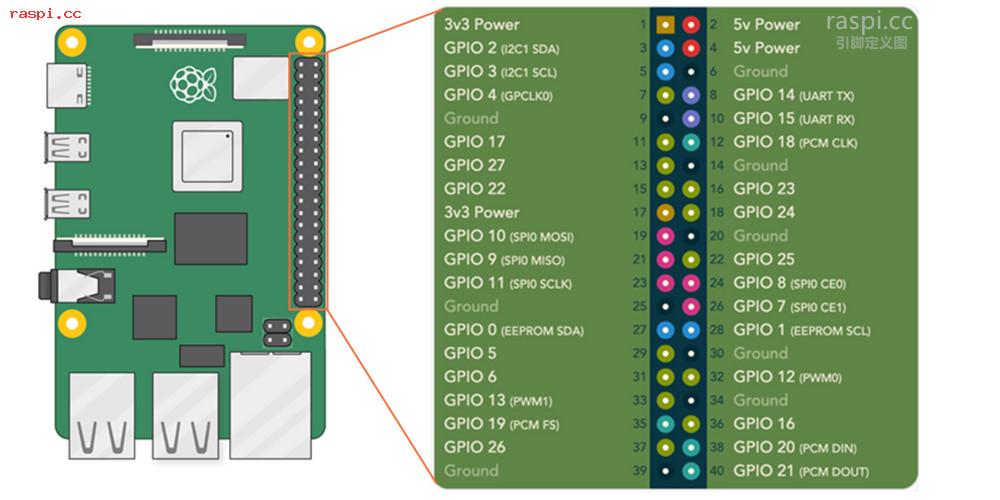
接线方法:(树莓派接线位置如果看不懂可以参考下面的图)
树莓派 5V ——— 超声波VCC
树莓派GND ——— 超声波GND
树莓派GPIO7 ——— 超声波Trig
树莓派GPIO5 ——— 超声波Echo
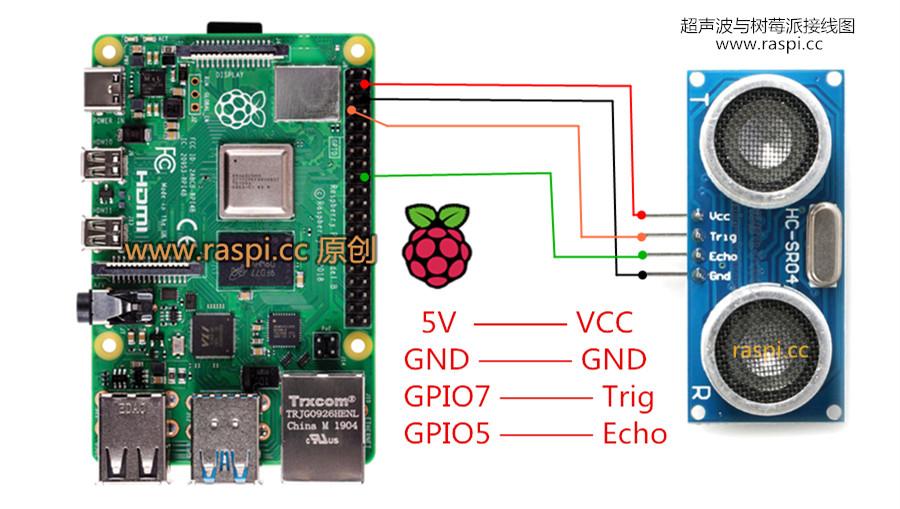
用杜邦线把树莓派的针脚2(物理编号,VCC,5V),针脚6(物理编号,GND,负极),针脚7(GPIO4 ,BCM编码4,Trig),针脚18(GPIO5,BCM编码24,Echo)
三:Python测距代码程序
新建一个py文件,输入命令
sudo nano sr04.py
编辑程序:
#!/usr/bin/env python3
import time
import RPi.GPIO as GPIO
trigger_pin =7
echo_pin =18
GPIO.setmode(GPIO.BOARD)
GPIO.setup(trigger_pin,GPIO.OUT)
GPIO.setup(echo_pin,GPIO.IN)
'''
TRIG 负责发射超声波,Echo 负责接收超声波
'''
def send_trigger_pulse():
#发送超声波,一直发
GPIO.output(trigger_pin,1)
# 为了防止错误,因为紧接着就需要把发射端置为高电平
time.sleep(0.0001)
#发射端置为高电平
GPIO.output(trigger_pin,0)
'''
ECHO 负责接收超声波
'''
def wait_for_echo(value,timeout):
count = timeout
#通过该代码持续获取ECHO的状态
while GPIO.input(echo_pin)!= value and count>0:
count = count-1
'''
计算距离
'''
def get_distance():
# 发射
send_trigger_pulse()
# 接收高电平 1/True
wait_for_echo(True,10000)
# 等待
start = time.time()
#接收低电平
wait_for_echo(False,10000)
finish = time.time()
pulse_len = finish-start
distance_cm = pulse_len/0.000058
return distance_cm
while True:
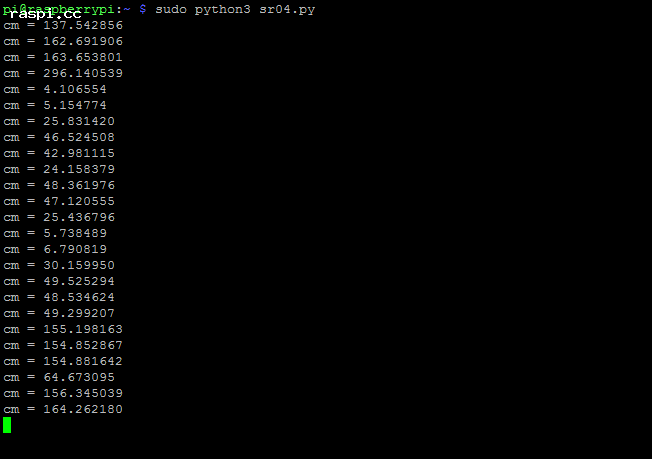
print("cm = %f"%get_distance())
time.sleep(1)保存Ctrl+X按Y,然后继续执行命令查看测距数据:
sudo python3 sr04.py
每隔1秒刷新一次数据,实测看成测距还算比较精准!
 广告
广告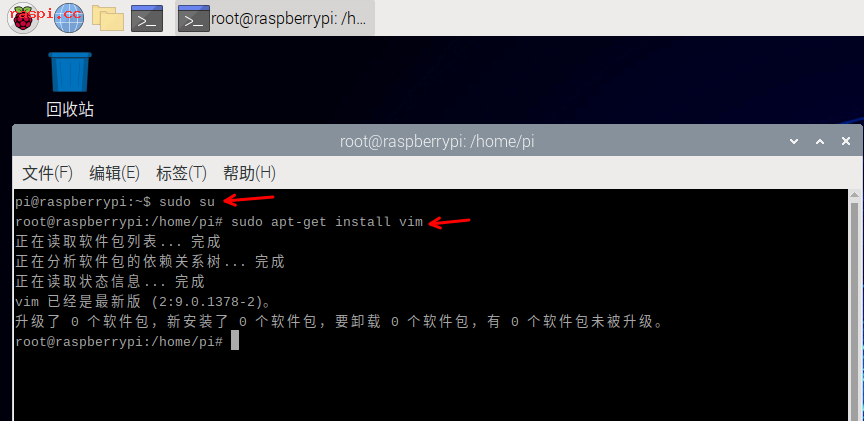






Copyright ©2024 www.raspi.cc All Rights Reserved. 树莓派极客本站版权所有 粤公网安备10068088号